カーネギーメロン大学の研究チームは、画像編集と異常検知を組み合わせてロボット制御モデルの性能低下を事前に予測する「RoboART」を公開した。実機試験を減らしつつ脆弱性を把握できる点が注目されている。
ロボットが実環境で動作する際、照明条件や背景、人や物体の配置といった視覚的要因の変化は制御性能に大きな影響を与える。しかし従来は、こうした影響を把握するには多数の実機試験が必要であり、時間とコストが課題となっていた。
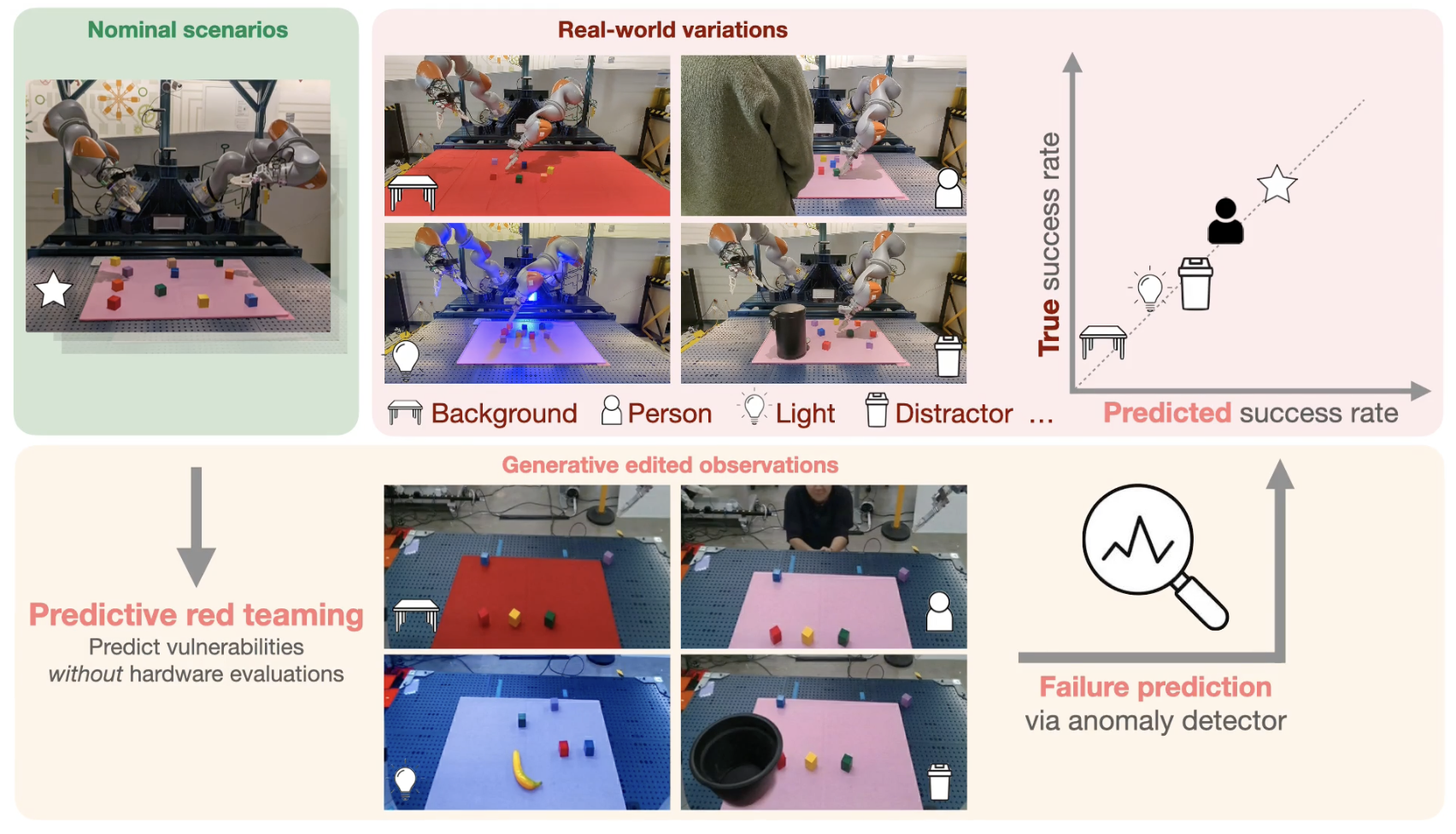
カーネギーメロン大学の研究チームが提案した「RoboART(Robustness Assessment via Red Teaming)」は、まず言語指示でロボットの視覚入力画像を編集し、照明や背景、物体の配置を多様に変化させる。その後、異常検知モデルを用いて制御性能の低下度合いを予測する仕組みだ。
500件を超える実機試験との比較では、成功率の予測誤差は平均0.19と高い精度を示した。さらに、予測によって特定された困難な条件下で追加データを用いた学習を行うと、ロボットの成功率は2倍から7倍に改善されたという。
研究チームは、この手法によって実機評価を大幅に効率化し、安全性を確保しながらロボットの脆弱性を早期に把握できると説明している。今後、産業や家庭での導入判断を支援する技術として注目が集まりそうだ。