米国研究チームは、人間の動作を動画から学びロボット操作へ応用する新手法「ImMimic」を発表した。従来はロボット専用の膨大なデータ収集が必要だったが、この手法では少数のロボット実演に加え、豊富な人間動画を利用することで学習効率を高める。
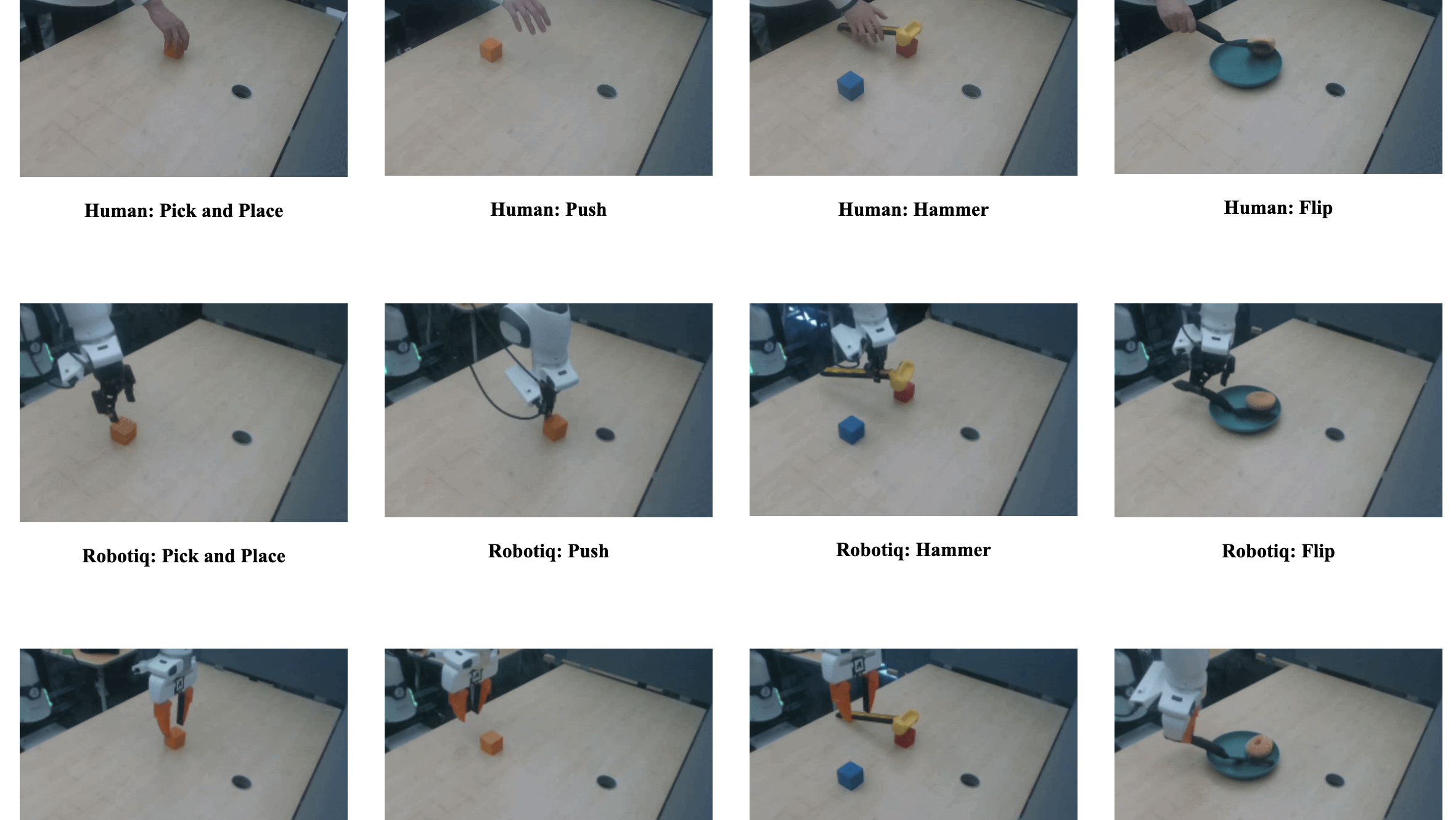
ImMimicは、人間の手の動きをロボットの関節に対応づける技術と、双方のデータを補間する手法を組み合わせる。これにより、ピック&プレースや押し出し、ハンマー動作など四種類の実タスクで成功率と動作の滑らかさが向上した。対象ロボットも多様で、産業用から研究用途まで幅広く適用できることが示された。
研究成果は、物流や製造業におけるロボット活用の加速を示唆する。人間の作業動画が学習資源として活用できることで、導入コスト削減や現場での柔軟な自動化推進に繋がる可能性が高い。今後は人間とロボットの協働領域がさらに広がることが期待される。