
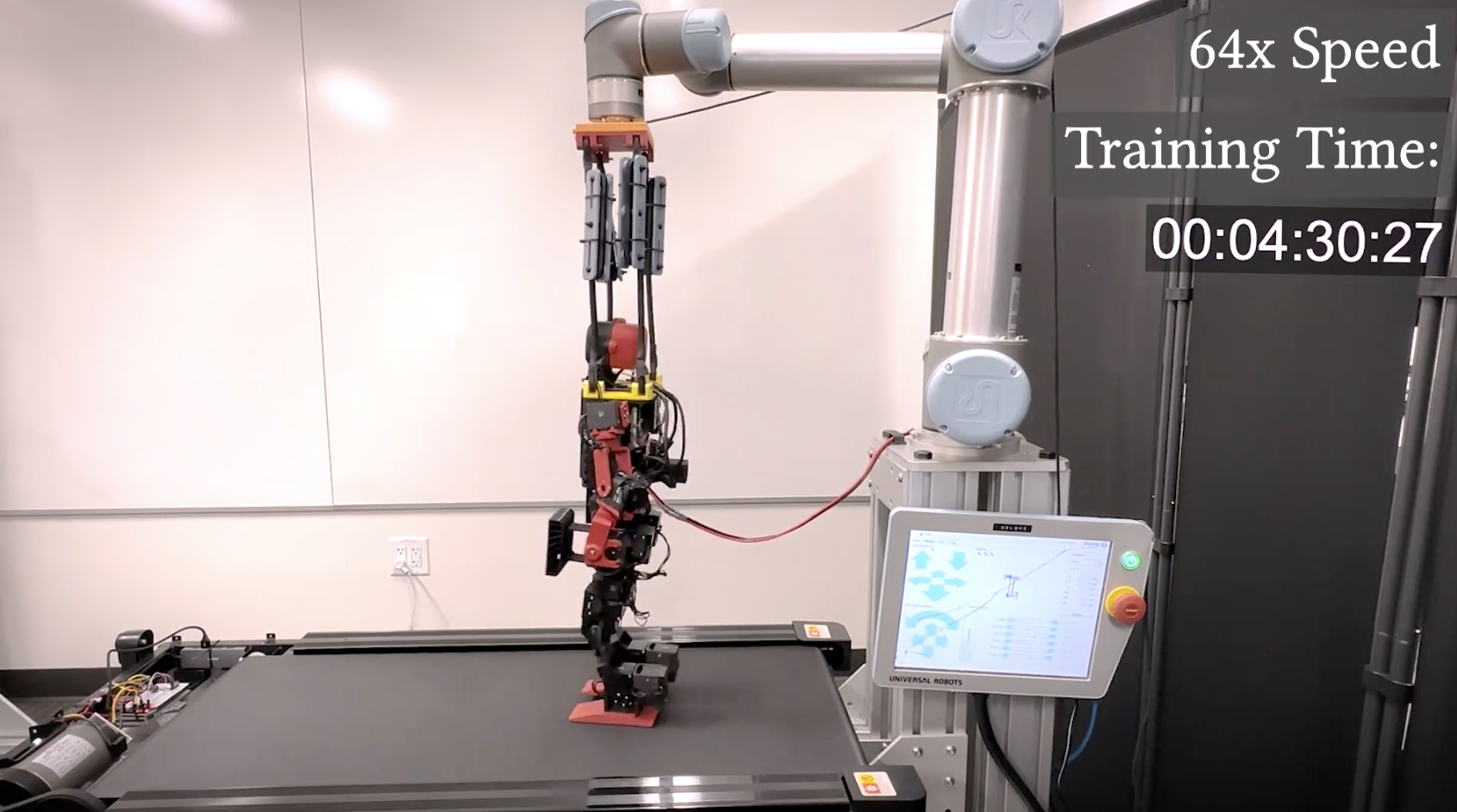
スタンフォード大学の研究チームは、ヒューマノイドロボットの実世界学習を効率化する新手法「Robot-Trains-Robot(RTR)」を発表した。ロボットアームが「教師」としてヒューマノイドを支援し、安全確保やリセット、報酬設計などを自動化する仕組みである。
従来、強化学習はシミュレーション環境での進展が大きかったが、実機適応は安全性や効率の問題から限定的だった。RTRはこの課題に対し、ロボットアームによる支援と新しい強化学習パイプラインを組み合わせることで、シミュレーションから実機への移行を滑らかにする。
実験では、ヒューマノイドの歩行速度の精密な制御や、ロープを使ったスイングアップ動作の学習を確認。どちらも人間の介入を最小限に抑えながら進行し、効率的な習得を可能にした。
同研究は、ロボット同士が協力しながら進化する新しい学習アプローチを提示しており、今後のサービス業や製造業など実社会でのヒューマノイド導入を後押しする可能性がある。

