量子計算を使い、ロボットの姿勢制御を効率化する手法が示された。芝浦工大・早大・富士通の共同研究だ。Scientific Reportsに論文が公開された。
Quantum computation for robot posture optimization - Scientific Reports
Quantum computing has gained attention for its potential to surpass classical computing in large-scale computations. In ...
www.nature.com
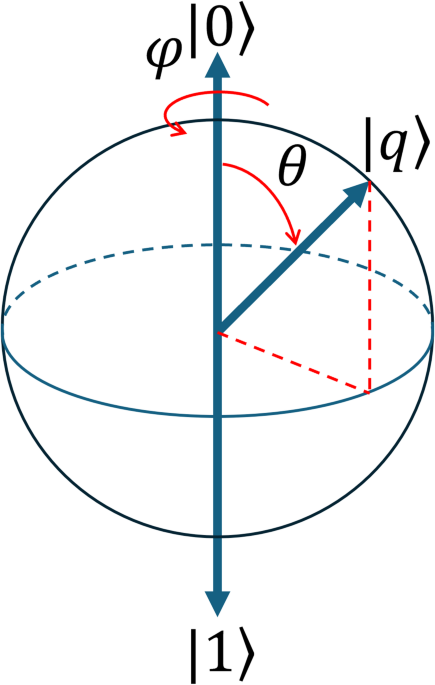
研究は、関節の向きや位置を量子ビットで表現する。順運動学は量子回路で計算し、逆運動学は古典計算で最適化する構成だ。量子もつれで関節間の連動を再現し、反復回数を抑える狙いだ。
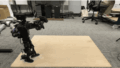
富士通の量子シミュレーターで検証し、従来法より少ない計算で最大43%の誤差低減を得たという。理研と富士通が開発した64量子ビット実機でも効果を確認した。17関節の全身モデルの計算を約30分で行えるとの試算も示された。
逆運動学は、目標位置から関節角度を求める要の計算だ。多関節になると解が多く、反復に時間がかかる。今回の方式は量子と古典の分担で計算負荷を下げる。現行のNISQ環境でも実装可能性があるとされる。
発表は、2025年8月25日に日英で公開された。論文のDOIは10.1038/s41598-025-12109-0だ。理研・富士通は2023年に64量子ビット機を公開し、2025年4月には256量子ビット機の開発を発表している。ハードの進展は実用域への近道となる。
産業面では、ヒューマノイドや多関節マニピュレータの滑らかな動作に寄与する余地がある。リアルタイム制御、障害物回避、エネルギー最適化などの応用が想定される。量子アルゴリズムの改良や量子ビット増強が進めば、導入検討の現場で価値が増す可能性がある。