
東京大学JSKロボティクス研究室は、オープンソースの二足歩行ロボット「MEVITA」を発表した。同ロボットは、ECサイトで入手可能な部品を活用し、板金溶接によって構造を一体化することで部品点数を削減。従来の3Dプリント製ロボットが抱える強度不足や、金属製ロボットの複雑な組立課題を解消した。
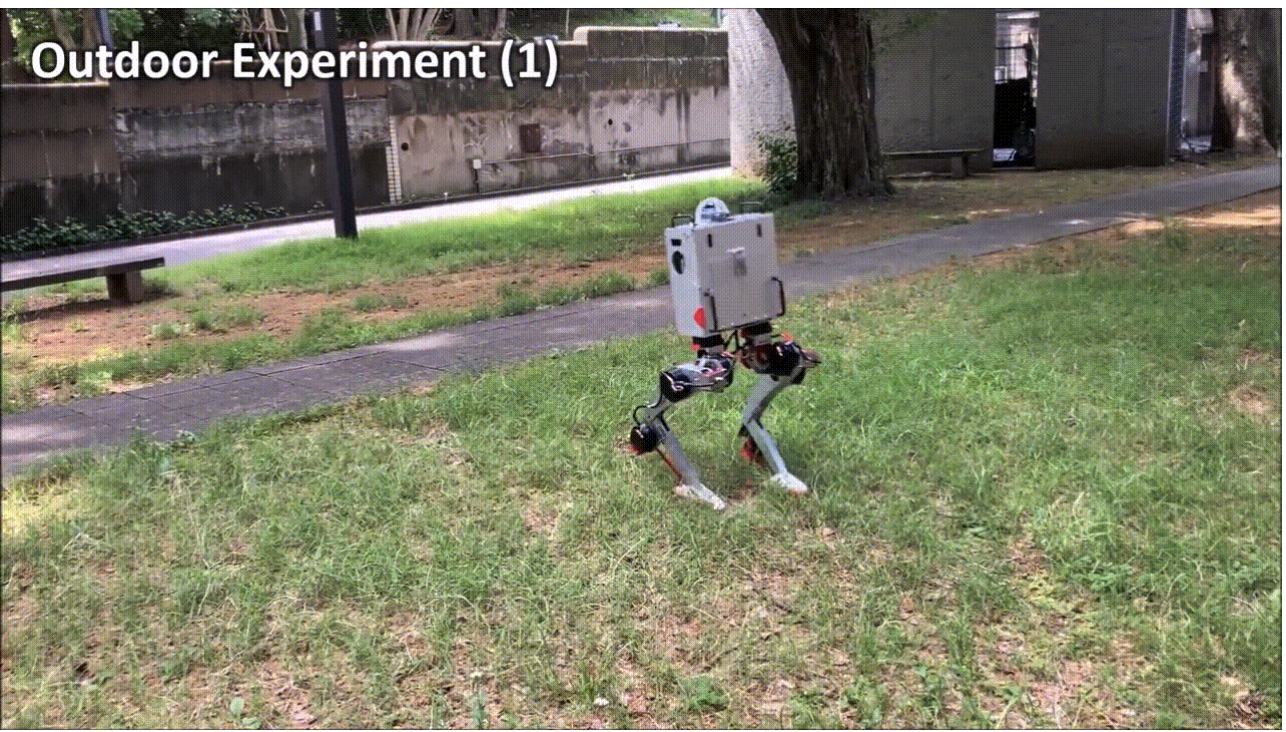
MEVITAは、18種類の金属部品から構成され、そのうち4種類は複雑形状を板金溶接で統合している。制御面では、強化学習を活用してシミュレーション環境で学習した歩行ポリシーを実機に移植。芝生や砂地など多様な環境での歩行実験において安定した動作を確認した。
ハードウェアやソフトウェアはすべて公開されており、研究者や開発者が自由に活用できる。今後は教育用途や産業応用を含め、ロボティクス分野全体での開発加速が期待される。

MEVITA: Open-Source Bipedal Robot Assembled from E-Commerce Components via Sheet Metal Welding
MEVITA : Open-Source Bipedal Robot Assembled from E-Commerce Components via Sheet Metal Welding; Humanoids 2025; Kento K...
haraduka.github.io

